商品详情





### 实时更新 PX4 二次开发教程
#### 讲师简介
讲师:Vincet,cwkj科技的无人机软件工程师,拥有计算机专业硕士学位。
自2017年起专注于无人机技术的研究与开发近十年,对PX4飞控固件有深厚的理解和丰富的实践经验。
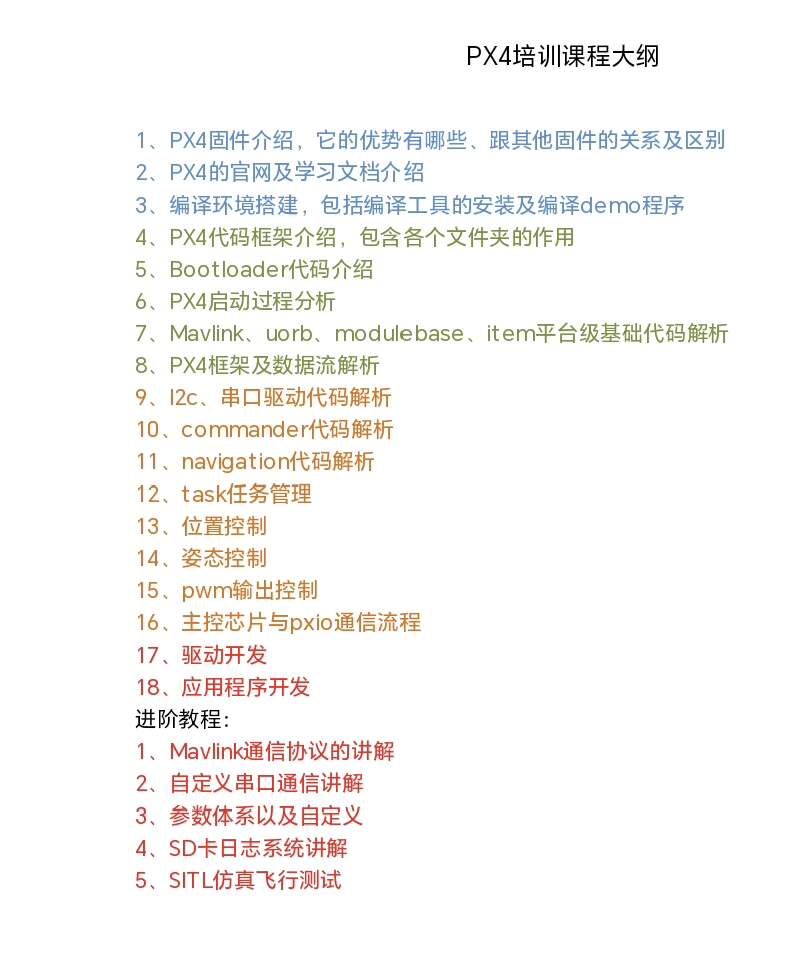
#### 课程大纲
- **PX4固件概览**:了解PX4的特点及其与其他飞行控制器的区别。
- **官方资源导览**:PX4官网及学习材料介绍。
- **搭建开发环境**:所需工具链的安装指南及编译步骤。
- **代码结构解读**:详解PX4项目目录下各文件夹的功能。
- **编译流程详解**:如何使用编译工具以及具体的编译方法。
- **启动程序分析**:Bootloader代码的作用及其实现机制。
- **系统启动过程**:PX4从上电到运行的全过程。
- **核心组件剖析**:Mavlink、uorb等平台级组件的工作原理。
- **硬件接口编程**:I2C、串口驱动程序设计及相关开发。
- **定位控制系统**:探讨位置控制的数据流管理。
- **Commander模块解析**:理解这一关键组件的功能。
- **导航算法详解**:navigation模块内部逻辑解析。
- **任务调度机制**:task管理的具体实现。
- **位姿调整技术**:深入研究位置与姿态控制。
- **混控器工作原理**:mixer模块的作用及配置。
- **遥控信号处理**:遥控器数据流的接收与处理。
- **PWM输出控制**:执行机构的控制策略。
- **主处理器与pxio通信**:两者间的信息交换流程。
#### 进阶主题(包含于课程内)
- Mavlink协议深度解析
- 自定义串行通讯协议
- 参数管理系统及个性化设置
- SD卡日志记录功能
- SITL模拟飞行测试
请注意,此商品仅提供视频教程,目前不提供额外的技术支持服务。

发货方式
自动:在特色服务中标有自动发货的商品,拍下后,源码类 软件类 商品会在订单详情页显示来自卖家的商品下载链接,点卡类 商品会在订单详情直接显示卡号密码。
手动:未标有自动发货的的商品,付款后,商品卖家会收到平台的手机短信、邮件提醒,卖家会尽快为您发货,如卖家长时间未发货,买家也可通过订单上的QQ或电话主动联系卖家。
退款说明
1、源码类:商品详情(含标题)与实际源码不一致的(例:描述PHP实际为ASP、描述的功能实际缺少、功能不能正常使用等)!有演示站时,与实际源码不一致的(但描述中有"不保证完全一样、可能有少许偏差"类似显著公告的除外);
2、营销推广类:未达到卖家描述标准的;
3、点卡软件类:所售点卡软件无法使用的;
3、发货:手动发货商品,在卖家未发货前就申请了退款的;
4、服务:卖家不提供承诺的售后服务的;(双方提前有商定和描述中有显著声明的除外)
5、其他:如商品或服务有质量方面的硬性常规问题的。未符合详情及卖家承诺的。
注:符合上述任一情况的,均支持退款,但卖家予以积极解决问题则除外。交易中的商品,卖家无法修改描述!
注意事项
1、在付款前,双方在QQ上所商定的内容,也是纠纷评判依据(商定与商品描述冲突时,以商定为准);
2、源码商品,同时有网站演示与商品详情图片演示,且网站演示与商品详情图片演示不一致的,默认按商品详情图片演示作为纠纷评判依据(卖家有特别声明或有额外商定的除外);
3、点卡软件商品,默认按商品详情作为纠纷评判依据(特别声明或有商定除外);
4、营销推广商品,默认按商品详情作为纠纷评判依据(特别声明或有商定除外);
5、在有"正当退款原因和依据"的前提下,写有"一旦售出,概不支持退款"等类似的声明,视为无效声明;
6、虽然交易产生纠纷的几率很小,卖家也肯定会给买家最完善的服务!但请买卖双方尽量保留如聊天记录这样的重要信息,以防产生纠纷时便于送码网快速介入处理。
淘好品声明
1、作为第三方中介平台,依据双方交易合同(商品描述、交易前商定的内容)来保障交易的安全及买卖双方的权益;
2、平台上所有的资源都是亲测无误的,在平台下单安全有保障,有任何问题,可以随时联系在线客服。